Reparatur / Modernisierung
Die in der Kranauslegung festgelegten geometrischen Parameter der Kranfahrt ändern sich im Betrieb des Krans unter dem Einfluss mechanischer und klimatischer Einflüsse erheblich. Extreme Abweichungen der geometrischen Wegparameter von der Konstruktion führen zu einer Erhöhung der Belastung des Fahrgestells und der Metallstruktur des Krans. Erhöhte Lasten führen zum vorzeitigen Ausfall von teuren und schwer zu ersetzenden Bauteilen des Krans und zu ungeplanten Stillstandzeiten im Zyklus des Krans.
Mit den Lösungen, die wir Ihnen anbieten, erreichen Sie:
o Verbesserung der Synchronisation der Brückenseiten
o Bestimmen Sie die Position der Wagen und der Brücke mit hoher Genauigkeit
o Bestimmen Sie die räumliche Position der Aufzüge mit hoher Genauigkeit
o Führen Sie im Rahmen der aktuellen Reparatur eine Bewegung entlang einer bestimmten Route durch
o Im Kalibrierungsmodus des Koordinatenbestimmungssystems können Sie das System nach einem Erdbebeneinschlag schnell und effizient konfigurieren
o Die rechtzeitige Kontrolle der geometrischen Parameter der Kranbahn verhindert eine Überlastung des Fahrgestells und der Metallstrukturen des Krans
o Die Durchführung einer geodätischen Vermessung der Strecke mit dem vorgeschlagenen System ist sicher und erfordert die Einbeziehung einer Mindestanzahl von Spezialisten
o Ein automatisiertes volumetrisches Scanner-Steuerungssystem vermeidet den Einfluss des menschlichen Faktors auf das Messergebnis
o Durch die Möglichkeit, den Volumenscanner fernzusteuern, können Sie Reparaturarbeiten an der Spur durchführen, indem Sie die Ergebnisse in Echtzeit messen
Wir bieten Ihnen eine schlüsselfertige Modernisierung von Steuerungssystemen für Brückenkräne an. Unser Leistungspaket besteht aus den drei folgenden Produkten:
1. Berührungsloses Lasersystem zur Ermittlung der Raumkoordinaten der Ladungsaufhängungen des Polarkrans
2. Adaptives Synchronisationssystem der Brückenseiten des Polarkrans
3. Automatisiertes Steuerungssystem für die geometrischen Parameter der Kranbahn des Polarkrans

Paket 1: Berührungsloses Lasersystem zur Ermittlung der Raumkoordinaten der Ladungsaufhängungen des Polarkrans
1. Beschreibung
des Algorithmus des vorgeschlagenen berührungslosen Systems zur Bestimmung der Raumkoordinaten
der Ladungsaufhängungen des Polarkrans
1.1. Ermittlung des Drehwinkels der Kranbrücke
o Es werden 6 Laser-Entfernungsmesser verwendet, die auf einem Kran mit einer Neigung von 60 ° installiert sind
o Lasersensoren sind im gleichen Winkel (Winkel γ) fixiert
o An beiden Seiten des Brückenträgers sind reflektierende Platten angebracht
o Abhängig von der Position der Kranbrücke werden für Berechnungen die Daten des entsprechenden Laser-Entfernungsmessers zur Verarbeitung angenommen: 1 und 4, 2 und 5, 3 und 6
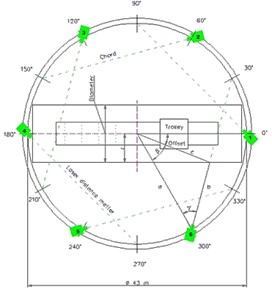
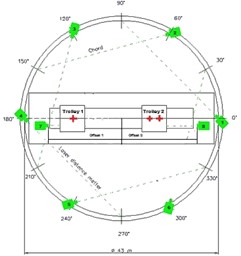
1.2. Bestimmung der kartesischen Koordinaten des Hubwagens 320t und des Hubwagens 160t und 2x70t
o Nach den bekannten Daten, wie dem Laufradius des Krans, den Abmessungen des Krans, dem bekannten Drehwinkel des Laserentfernungsmessers γ, wird der Drehwinkel des Krans nach dem Kosinussatz berechnet.
o Zunächst wird
die Seitenlänge ![]()
berechnet, wobei a der Radius der Kranbahn ist, b die vom Laser-Entfernungsmesser gemessene Entfernung zur reflektierenden Platte auf dem Fachwerk
o
Als nächstes wird der Drehwinkel ![]()
Berechnet. Der Winkel aufgrund der Breite des Kranbrückenversatzes wird durch die Formel bestimmt: Versatz = Bogen in r / c, wobei r gleich der halben Breite der Kranbrücke ist
o Der resultierende Winkel ist die Summe aus dem Drehwinkel β und dem Winkelversatz
1.3. Bestimmung der kartesischen Koordinaten von Hebezeugen
- Der Abstand des entsprechenden Wagens von der Mitte des Reaktorraums wird anhand der Messdaten des entsprechenden Entfernungsmessers unter Berücksichtigung der von der Initialisierungsfunktion für den entsprechenden Wagen berechneten konstanten Verschiebungen ermittelt: Abstand = Offset-Abstand_Laser
o Wenn Sie den entsprechenden Wagen über die Mitte hinausbewegen, wird der Abstandswert durch eine negative Zahl dargestellt
- Die kartesischen Koordinaten des entsprechenden Wagens werden nach den folgenden Formeln berechnet:
X_Trolley = Abstand × cosα; Y _Trolley = Abstand × sinα
o 𝜶 - resultierender Drehwinkel der Brücke
wo: Abstand - Abstand des Wagens vom Zentrum,
- Die kartesischen Koordinaten der Ladungsaufhängung des entsprechenden Aufzugs werden durch die Formeln bestimmt:
X_Hoist = X_Trolley-Shift × cosα
Y_Hoist = Y_Trolley-Shift × sinα
Paket 2: Adaptives Synchronisationssystem der Brückenseiten des Polarkrans.
o Die Kranbahn weist nach Inbetriebnahme keine Abweichungen vertikal (dh = 0) und horizontal (dS = 0) auf. Die zurückgelegte Distanz entspricht der Distanz
o Die Synchronisation der Seiten der Brücke wird erreicht, indem für jede Seite eine konstante lineare Geschwindigkeit aufrechterhalten wird, d.h. Bei gleichen Intervallen legt jede Seite die gleiche Strecke zurück
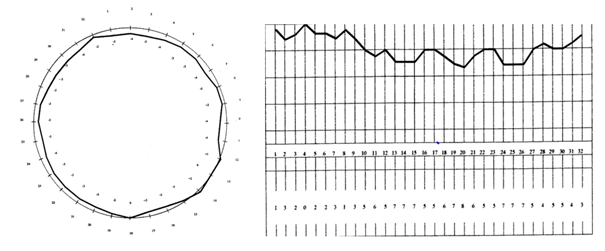
o Die Kranbahn wird dabei durch mechanische und klimatische Einflüsse deformiert. Der Weg ist nicht gleich der Entfernung
o Die Verformung führt zu einer Höhendifferenz (dHc) zwischen diametral gegenüberliegenden Punkten der Kranfahrt. Der Weg ist nicht gleich der Entfernung
o Wenn der Differenzmodul | dHc1 - dHc2 | Ist Seite 1 und Seite 2 größer als 0, so unterscheiden sich die von jeder Seite der Brücke für gleiche Zeitintervalle zurückgelegten Entfernungen
o Die vorhandene Kransteuerung sorgt weiterhin für eine Synchronisation, indem die Geschwindigkeit an den Seiten der Brücke konstant gehalten wird
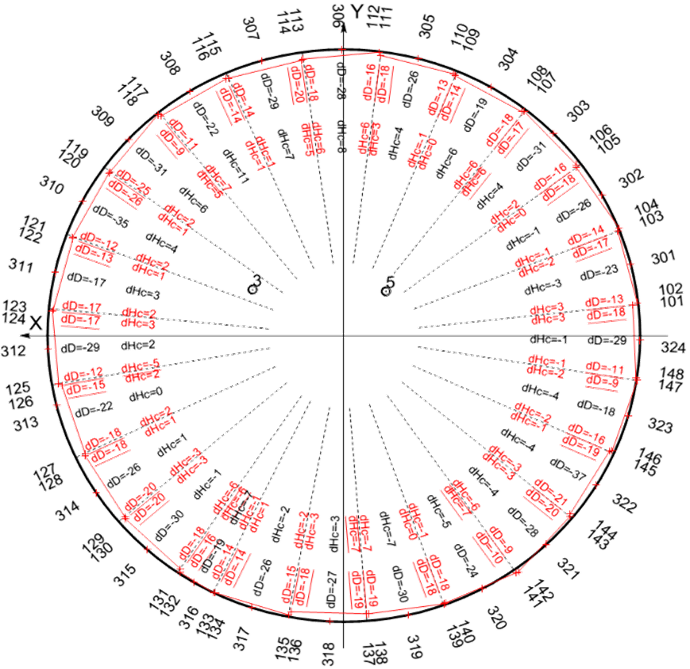
o Während des Betriebs der Anlage während der Überholung wird regelmäßig eine geodätische Vermessung der Kranbahn durchgeführt
o Die Ergebnisse der geodätischen Vermessung werden grafisch und tabellarisch dargestellt
o Die Ergebnisse der geodätischen Vermessung des Gleises können durch „manuelle“ Dateneingabe in die SCADA WinCC-Tabelle in die vorhandene Steuerung übernommen werden
o Mit der von uns im Rahmen von SCADA entwickelten Spezialsoftware werden geodätische Vermessungsdaten verarbeitet und Geschwindigkeitskorrekturrezepte für die Brückenseiten erstellt
o Die berechneten Geschwindigkeits- und Beschleunigungskorrekturfaktoren werden in das vorhandene Automatisierungssystem Simatic S7-400 übertragen
o Mit der von uns für Simatic S7-400 entwickelten Spezialsoftware werden die Korrekturwerte für Geschwindigkeit und Beschleunigung in die Korrekturwerte für Geschwindigkeit und Intensität der vorhandenen SIMOREG-Geber umgerechnet
o
Auf diese Weise wird eine echte Synchronisation der Seiten der
Kranbrücke erreicht, bei der jede Seite der Brücke unabhängig von der Form des
Pfades für gleiche Zeiträume dieselbe Strecke zurücklegt
Paket 3: Automatisiertes Steuerungssystem für die geometrischen Parameter der Kranbahn des Polarkrans
o Konzeptentwicklung
o Entwicklung der Konstruktionsdokumentation
o
Softwareentwicklung
