Ремонтные работы, модернизация
Геометрические параметры подкранового пути, заложенные при проектировании крана значительно изменяются в процессе эксплуатации крана под действием механических и климатических воздействий. Запредельные отклонения геометрических параметров пути от проектных приводят к увеличению нагрузок на ходовую часть и металлоконструкции крана. Увеличение нагрузок приводит к преждевременному выходу из строя дорогостоящих и сложно заменяемых элементов конструкции крана и к внеплановым простоям в цикле работы крана.
С помощью предлагаемых нами решений вы достигнете:
o улучшения синхронизации сторон моста
o определения положения тележек и моста с высокой точностью
o определения пространственного положения подъёмов с высокой точностью
o выполнения движения по заданному маршруту в рамках текущего ремонта
o режим калибровки системы определения координат позволит быстро и эффективно настроить систему после сейсмического воздействия
o своевременного контроля геометрических параметров подкранового пути исключит перегрузки ходовой части и металлоконструкций крана
o проведения геодезической съёмки пути с использованием предлагаемой системы безопасно и с привлечением минимального количества специалистов
o автоматизированная система управления объёмным сканером позволит избежать воздействие человеческого фактора на результат измерения
o возможности управления объёмным сканером дистанционно выполнять работы по ремонту пути с измерение его результатов в реальном времени
Предлагаем вам модернизацию систем управления мостовых кранов. Наш пакет услуг состоит из следующих трех продуктов:
1. Лазерная бесконтактная система определения пространственных координат грузовых подвесок полярного крана
2. Адаптивная система синхронизации сторон моста полярного крана
3. Автоматизированная система контроля геометрических параметров подкранового пути полярного крана

продукт 1: Лазерная бесконтактная система определения пространственных координат грузовых подвесок полярного крана
1. Описание алгоритма предлагаемой бесконтактная система определения пространственных координат грузовых подвесок полярного крана
1.1. Определение угла поворота моста крана
o Применяются 6 лазерных дальномеров, установленных на подкрановом пути через 60º
o Лазерные датчики фиксируются под одинаковым углом (угол γ)
o Отражающие пластины монтируются с двух сторон моста
o В зависимости от положения моста крана, для вычислений принимаются в обработку данные от соответствующей пары лазерных дальномеров: 1 и 4, 2 и 5, 3 и 6
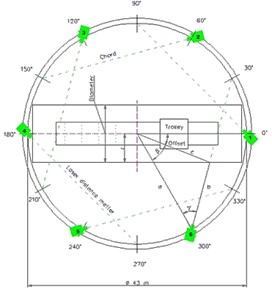
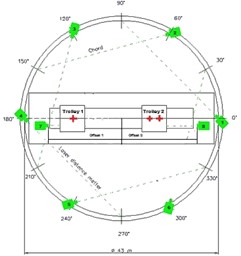
1.2. Определение декартовых координат тележки подъема 320т и тележки подъемов 160т и 2*70т
o известным данным, как радиус подкранового пути, размеры крана, известный угол поворота лазерных дальномеров γ вычисляется при помощи теоремы косинусов угол поворота крана.
o Во-первых, длина стороны ![]()
рассчитывается, где a - радиус подкранового пути, b - расстояние, измеренное лазерным дальномером до отражающей пластины
o
Далее идет угол поворота ![]()
рассчитывается. Угол из-за ширины смещения крана моста определяется по формуле: Смещение = арка в r / c, где r равно половине ширины крана моста.
o Результирующий угол является суммой угла поворота β и угла offset
1.3. Определение декартовых координат грузовых подвесок подъемов
- Расстояние соответствующей тележки от центра реакторного отделения определяется на основании данных измерения соответствующего дальномера с учетом постоянных смещений, вычисляемых функцией инициализации для соответствующей тележки: Distance=Offset-Distance_Laser
o При переезде соответствующей тележки за центр, значение расстояния будет представлено отрицательным числом.
- Декартовые координаты соответствующей тележки рассчитываются по формулам:
X_Trolley = Distance × cosα; Y _Trolley = Distance × sinα
o 𝜶 - результирующий угол поворота
где: Distance – расстояние тележки от центра
- Декартовые координаты грузовой подвески соответствующего подъема определяются по формулам:
X_Hoist = X_Trolley-Shift × cosα
Y_Hoist = Y_Trolley-Shift × sinα
продукт 2: Адаптивная система синхронизации сторон моста полярного крана. Описание проблемы.
o После ввода крана в эксплуатацию подкрановый путь не имеет отклонений по вертикали (dh = 0) и горизонтали (dS = 0). Пройденный путь равен расстоянию
o Синхронизация сторон моста достигается за счёт поддержания постоянной одинаковой линейной скорости для каждой из сторон ,т.е. за равные промежутки времени каждая сторона проходит одинаковое расстояние
o В процессе работы происходит деформация подкранового пути из-за воздействия механических и климатических факторов. Путь не равен расстоянию
o В результате деформации возникает разница по высоте (dHc) между диаметрально противоположными точками на подкрановом пути. Путь не равен расстоянию
o Если модуль разности |dHc1 – dHc2| для стороны 1 и стороны 2 больше 0, то расстояния, проходимые каждой из сторон моста за равные промежутки времени , отличаются
o Действующая система управления крана по прежнему обеспечивает синхронизацию за счёт поддержания постоянной одинаковой скорости для сторон моста
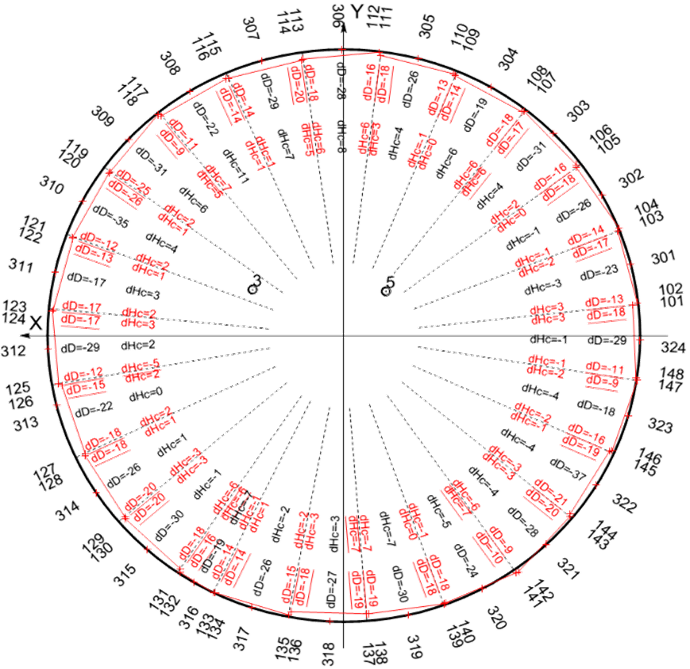
o В процессе эксплуатации блока во время проведения ППР регулярно проводится геодезическое обследование подкранового пути
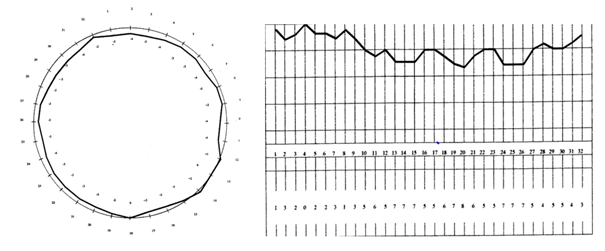
o Результаты геодезического обследования предоставляются в графическом и табличном виде
o Результаты геодезического обследования пути могут быть введены в существующую систему управления посредством “ручного” ввода данных в таблицу SCADA WinCC
o Средствами разработанного нами специального программного обеспечения в составе SCADA осуществляется обработка данных геодезического обследования и построение “рецептов” корректировки скорости для сторон моста
o Вычисленные корректирующие коэффициенты скорости и ускорения передаются в существующую систему автоматизации Simatic S7-400
o Средствами разработанного нами специального программного обеспечения для Simatic S7-400 корректирующие коэффициенты скорости и ускорения преобразуются в корректирующие задания скорости и задатчика интенсивности для существующих преобразователей SIMOREG
o
Таким образом достигается реальная синхронизация сторон моста крана, при которой за равные промежутки времени каждая из сторон моста проходит одинаковое расстояние,не зависимо от формы пути .
продукт 3: Автоматизированная система контроля геометрии подкранового монорельса полярного крана SKET
o Разработка концепции
o Разработка конструкторской документации
o
Разработка программного обеспечения
